接上
因为我们要学习的是特征的表达,那么关于特征,或者说关于这个层级特征,我们需要了解地更深入点。所以在说Deep Learning之前,我们有必要再啰嗦下特征(呵呵,实际上是看到那么好的对特征的解释,不放在这里有点可惜,所以就塞到这了)。
四、关于特征
特征是机器学习系统的原材料,对最终模型的影响是毋庸置疑的。如果数据被很好的表达成了特征,通常线性模型就能达到满意的精度。那对于特征,我们需要考虑什么呢?
4.1、特征表示的粒度
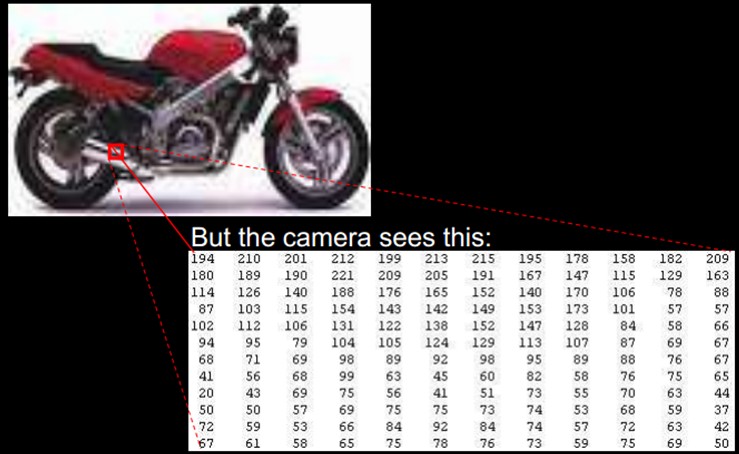
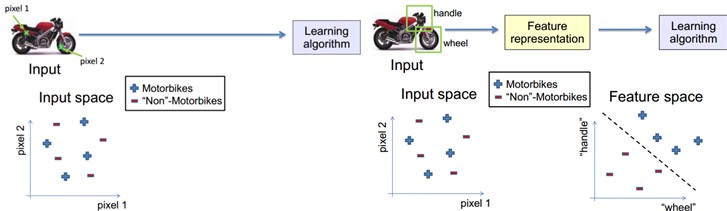
学习算法在一个什么粒度上的特征表示,才有能发挥作用?就一个图片来说,像素级的特征根本没有价值。例如下面的摩托车,从像素级别,根本得不到任何信息,其无法进行摩托车和非摩托车的区分。而如果特征是一个具有结构性(或者说有含义)的时候,比如是否具有车把手(handle),是否具有车轮(wheel),就很容易把摩托车和非摩托车区分,学习算法才能发挥作用。
4.2、初级(浅层)特征表示
既然像素级的特征表示方法没有作用,那怎样的表示才有用呢?
1995 年前后,Bruno Olshausen和 David Field 两位学者任职 Cornell University,他们试图同时用生理学和计算机的手段,双管齐下,研究视觉问题。
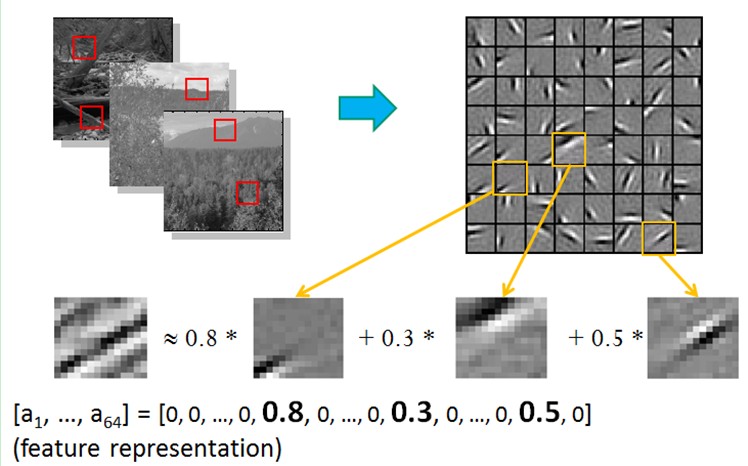
他们收集了很多黑白风景照片,从这些照片中,提取出400个小碎片,每个照片碎片的尺寸均为 16x16 像素,不妨把这400个碎片标记为 S[i], i = 0,.. 399。接下来,再从这些黑白风景照片中,随机提取另一个碎片,尺寸也是 16x16 像素,不妨把这个碎片标记为 T。
他们提出的问题是,如何从这400个碎片中,选取一组碎片,S[k], 通过叠加的办法,合成出一个新的碎片,而这个新的碎片,应当与随机选择的目标碎片 T,尽可能相似,同时,S[k] 的数量尽可能少。用数学的语言来描述,就是:
Sum_k (a[k] * S[k]) --> T, 其中 a[k] 是在叠加碎片 S[k] 时的权重系数。
为解决这个问题,Bruno Olshausen和 David Field 发明了一个算法,稀疏编码(Sparse Coding)。
稀疏编码是一个重复迭代的过程,每次迭代分两步:
1)选择一组 S[k],然后调整 a[k],使得Sum_k (a[k] * S[k]) 最接近 T。
2)固定住 a[k],在 400 个碎片中,选择其它更合适的碎片S’[k],替代原先的 S[k],使得Sum_k (a[k] * S’[k]) 最接近 T。
经过几次迭代后,最佳的 S[k] 组合,被遴选出来了。令人惊奇的是,被选中的 S[k],基本上都是照片上不同物体的边缘线,这些线段形状相似,区别在于方向。
Bruno Olshausen和 David Field 的算法结果,与 David Hubel 和Torsten Wiesel 的生理发现,不谋而合!
也就是说,复杂图形,往往由一些基本结构组成。比如下图:一个图可以通过用64种正交的edges(可以理解成正交的基本结构)来线性表示。比如样例的x可以用1-64个edges中的三个按照0.8,0.3,0.5的权重调和而成。而其他基本edge没有贡献,因此均为0 。
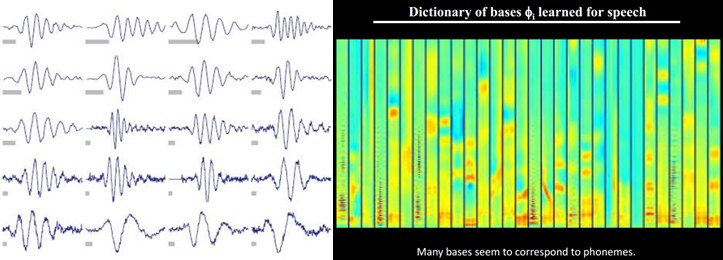
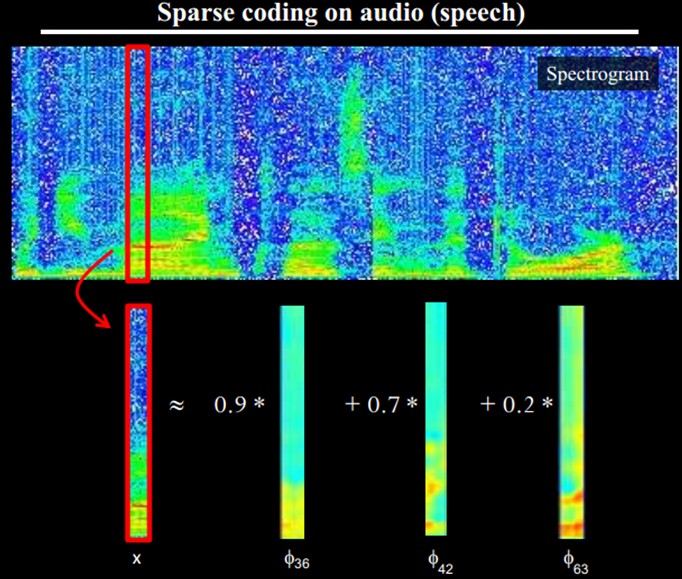
另外,大牛们还发现,不仅图像存在这个规律,声音也存在。他们从未标注的声音中发现了20种基本的声音结构,其余的声音可以由这20种基本结构合成。
4.3、结构性特征表示
小块的图形可以由基本edge构成,更结构化,更复杂的,具有概念性的图形如何表示呢?这就需要更高层次的特征表示,比如V2,V4。因此V1看像素级是像素级。V2看V1是像素级,这个是层次递进的,高层表达由底层表达的组合而成。专业点说就是基basis。V1取提出的basis是边缘,然后V2层是V1层这些basis的组合,这时候V2区得到的又是高一层的basis。即上一层的basis组合的结果,上上层又是上一层的组合basis……(所以有大牛说Deep learning就是“搞基”,因为难听,所以美其名曰Deep learning或者Unsupervised Feature Learning)
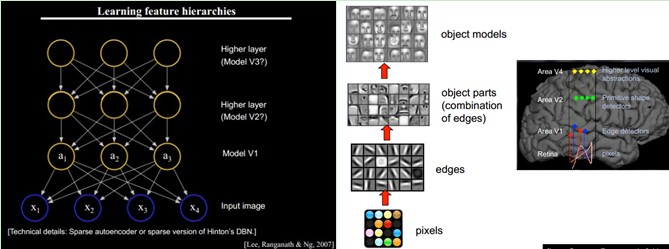
直观上说,就是找到make sense的小patch再将其进行combine,就得到了上一层的feature,递归地向上learning feature。
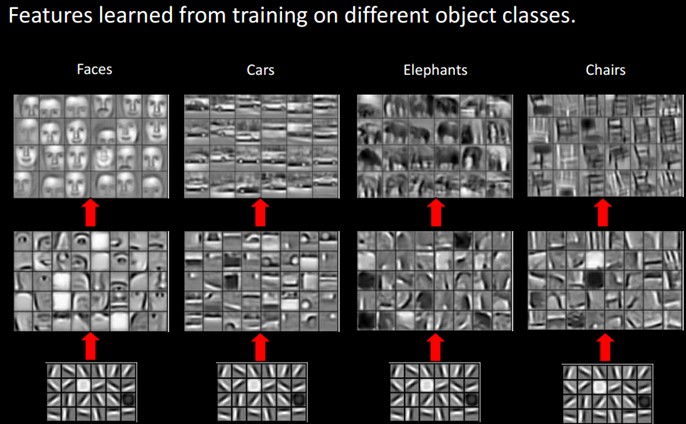
在不同object上做training是,所得的edge basis 是非常相似的,但object parts和models 就会completely different了(那咱们分辨car或者face是不是容易多了):
从文本来说,一个doc表示什么意思?我们描述一件事情,用什么来表示比较合适?用一个一个字嘛,我看不是,字就是像素级别了,起码应该是term,换句话说每个doc都由term构成,但这样表示概念的能力就够了嘛,可能也不够,需要再上一步,达到topic级,有了topic,再到doc就合理。但每个层次的数量差距很大,比如doc表示的概念->topic(千-万量级)->term(10万量级)->word(百万量级)。
一个人在看一个doc的时候,眼睛看到的是word,由这些word在大脑里自动切词形成term,在按照概念组织的方式,先验的学习,得到topic,然后再进行高层次的learning。
4.4、需要有多少个特征?
我们知道需要层次的特征构建,由浅入深,但每一层该有多少个特征呢?
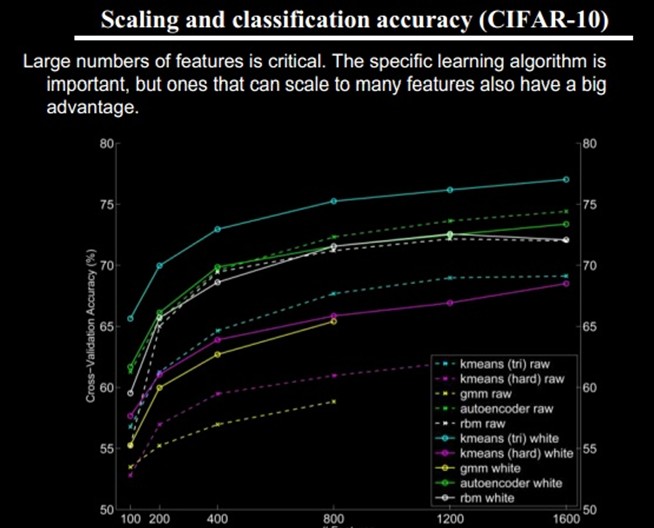
任何一种方法,特征越多,给出的参考信息就越多,准确性会得到提升。但特征多意味着计算复杂,探索的空间大,可以用来训练的数据在每个特征上就会稀疏,都会带来各种问题,并不一定特征越多越好。
好了,到了这一步,终于可以聊到Deep learning了。上面我们聊到为什么会有Deep learning(让机器自动学习良好的特征,而免去人工选取过程。还有参考人的分层视觉处理系统),我们得到一个结论就是Deep learning需要多层来获得更抽象的特征表达。那么多少层才合适呢?用什么架构来建模呢?怎么进行非监督训练呢?
好了,到了这一步,终于可以聊到Deep learning了。上面我们聊到为什么会有Deep learning(让机器自动学习良好的特征,而免去人工选取过程。还有参考人的分层视觉处理系统),我们得到一个结论就是Deep learning需要多层来获得更抽象的特征表达。那么多少层才合适呢?用什么架构来建模呢?怎么进行非监督训练呢?
五、Deep Learning的基本思想
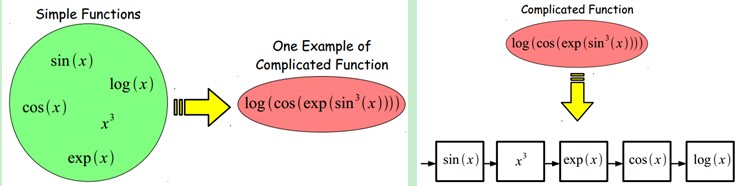
假设我们有一个系统S,它有n层(S1,…Sn),它的输入是I,输出是O,形象地表示为: I =>S1=>S2=>…..=>Sn => O,如果输出O等于输入I,即输入I经过这个系统变化之后没有任何的信息损失(呵呵,大牛说,这是不可能的。信息论中有个“信息逐层丢失”的说法(信息处理不等式),设处理a信息得到b,再对b处理得到c,那么可以证明:a和c的互信息不会超过a和b的互信息。这表明信息处理不会增加信息,大部分处理会丢失信息。当然了,如果丢掉的是没用的信息那多好啊),保持了不变,这意味着输入I经过每一层Si都没有任何的信息损失,即在任何一层Si,它都是原有信息(即输入I)的另外一种表示。现在回到我们的主题Deep Learning,我们需要自动地学习特征,假设我们有一堆输入I(如一堆图像或者文本),假设我们设计了一个系统S(有n层),我们通过调整系统中参数,使得它的输出仍然是输入I,那么我们就可以自动地获取得到输入I的一系列层次特征,即S1,…, Sn。
对于深度学习来说,其思想就是对堆叠多个层,也就是说这一层的输出作为下一层的输入。通过这种方式,就可以实现对输入信息进行分级表达了。
另外,前面是假设输出严格地等于输入,这个限制太严格,我们可以略微地放松这个限制,例如我们只要使得输入与输出的差别尽可能地小即可,这个放松会导致另外一类不同的Deep Learning方法。上述就是Deep Learning的基本思想。
六、浅层学习(Shallow Learning)和深度学习(Deep Learning)
浅层学习是机器学习的第一次浪潮。
20世纪80年代末期,用于人工神经网络的反向传播算法(也叫Back Propagation算法或者BP算法)的发明,给机器学习带来了希望,掀起了基于统计模型的机器学习热潮。这个热潮一直持续到今天。人们发现,利用BP算法可以让一个人工神经网络模型从大量训练样本中学习统计规律,从而对未知事件做预测。这种基于统计的机器学习方法比起过去基于人工规则的系统,在很多方面显出优越性。这个时候的人工神经网络,虽也被称作多层感知机(Multi-layer Perceptron),但实际是种只含有一层隐层节点的浅层模型。
20世纪90年代,各种各样的浅层机器学习模型相继被提出,例如支撑向量机(SVM,Support Vector Machines)、 Boosting、最大熵方法(如LR,Logistic Regression)等。这些模型的结构基本上可以看成带有一层隐层节点(如SVM、Boosting),或没有隐层节点(如LR)。这些模型无论是在理论分析还是应用中都获得了巨大的成功。相比之下,由于理论分析的难度大,训练方法又需要很多经验和技巧,这个时期浅层人工神经网络反而相对沉寂。
深度学习是机器学习的第二次浪潮。
2006年,加拿大多伦多大学教授、机器学习领域的泰斗Geoffrey Hinton和他的学生RuslanSalakhutdinov在《科学》上发表了一篇文章,开启了深度学习在学术界和工业界的浪潮。这篇文章有两个主要观点:1)多隐层的人工神经网络具有优异的特征学习能力,学习得到的特征对数据有更本质的刻画,从而有利于可视化或分类;2)深度神经网络在训练上的难度,可以通过“逐层初始化”(layer-wise pre-training)来有效克服,在这篇文章中,逐层初始化是通过无监督学习实现的。
当前多数分类、回归等学习方法为浅层结构算法,其局限性在于有限样本和计算单元情况下对复杂函数的表示能力有限,针对复杂分类问题其泛化能力受到一定制约。深度学习可通过学习一种深层非线性网络结构,实现复杂函数逼近,表征输入数据分布式表示,并展现了强大的从少数样本集中学习数据集本质特征的能力。(多层的好处是可以用较少的参数表示复杂的函数)
深度学习的实质,是通过构建具有很多隐层的机器学习模型和海量的训练数据,来学习更有用的特征,从而最终提升分类或预测的准确性。因此,“深度模型”是手段,“特征学习”是目的。区别于传统的浅层学习,深度学习的不同在于:1)强调了模型结构的深度,通常有5层、6层,甚至10多层的隐层节点;2)明确突出了特征学习的重要性,也就是说,通过逐层特征变换,将样本在原空间的特征表示变换到一个新特征空间,从而使分类或预测更加容易。与人工规则构造特征的方法相比,利用大数据来学习特征,更能够刻画数据的丰富内在信息。
七、Deep learning与Neural Network
深度学习是机器学习研究中的一个新的领域,其动机在于建立、模拟人脑进行分析学习的神经网络,它模仿人脑的机制来解释数据,例如图像,声音和文本。深度学习是无监督学习的一种。
深度学习的概念源于人工神经网络的研究。含多隐层的多层感知器就是一种深度学习结构。深度学习通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。
Deep learning本身算是machine learning的一个分支,简单可以理解为neural network的发展。大约二三十年前,neural network曾经是ML领域特别火热的一个方向,但是后来确慢慢淡出了,原因包括以下几个方面:
1)比较容易过拟合,参数比较难tune,而且需要不少trick;
2)训练速度比较慢,在层次比较少(小于等于3)的情况下效果并不比其它方法更优;
所以中间有大约20多年的时间,神经网络被关注很少,这段时间基本上是SVM和boosting算法的天下。但是,一个痴心的老先生Hinton,他坚持了下来,并最终(和其它人一起Bengio、Yann.lecun等)提成了一个实际可行的deep learning框架。
Deep learning与传统的神经网络之间有相同的地方也有很多不同。
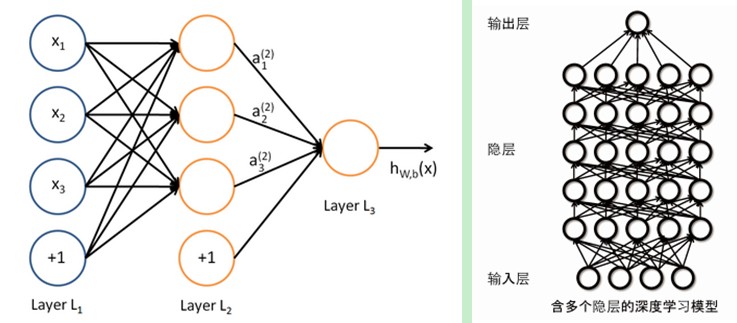
二者的相同在于deep learning采用了神经网络相似的分层结构,系统由包括输入层、隐层(多层)、输出层组成的多层网络,只有相邻层节点之间有连接,同一层以及跨层节点之间相互无连接,每一层可以看作是一个logistic regression模型;这种分层结构,是比较接近人类大脑的结构的。
而为了克服神经网络训练中的问题,DL采用了与神经网络很不同的训练机制。传统神经网络中,采用的是back propagation(BP反向传播)的方式进行,简单来讲就是采用迭代的算法来训练整个网络,随机设定初值,计算当前网络的输出,然后根据当前输出和label之间的差去改变前面各层的参数,直到收敛(整体是一个梯度下降法)。而deep learning整体上是一个layer-wise的训练机制。这样做的原因是因为,如果采用back propagation的机制,对于一个deep network(7层以上),残差传播到最前面的层已经变得太小,出现所谓的gradient diffusion(梯度扩散)。这个问题我们接下来讨论。
八、Deep learning训练过程
8.1、传统神经网络的训练方法为什么不能用在深度神经网络
BP算法作为传统训练多层网络的典型算法,实际上对仅含几层网络,该训练方法就已经很不理想。深度结构(涉及多个非线性处理单元层)非凸目标代价函数中普遍存在的局部最小是训练困难的主要来源。
BP算法存在的问题:
(1)梯度越来越稀疏:从顶层越往下,误差校正信号越来越小;
(2)收敛到局部最小值:尤其是从远离最优区域开始的时候(随机值初始化会导致这种情况的发生);
(3)一般,我们只能用有标签的数据来训练:但大部分的数据是没标签的,而大脑可以从没有标签的的数据中学习;
8.2、deep learning训练过程
如果对所有层同时训练,时间复杂度会太高;如果每次训练一层,偏差就会逐层传递。这会面临跟上面监督学习中相反的问题,会严重欠拟合(因为深度网络的神经元和参数太多了)。
2006年,hinton提出了在非监督数据上建立多层神经网络的一个有效方法,简单的说,分为两步,一是每次训练一层网络,二是调优,使原始表示x向上生成的高级表示r和该高级表示r向下生成的x'尽可能一致。方法是:
1)首先逐层构建单层神经元,这样每次都是训练一个单层网络。
2)当所有层训练完后,Hinton使用wake-sleep算法进行调优。
将除最顶层的其它层间的权重变为双向的,这样最顶层仍然是一个单层神经网络,而其它层则变为了图模型。向上的权重用于“认知”,向下的权重用于“生成”。然后使用Wake-Sleep算法调整所有的权重。让认知和生成达成一致,也就是保证生成的最顶层表示能够尽可能正确的复原底层的结点。比如顶层的一个结点表示人脸,那么所有人脸的图像应该激活这个结点,并且这个结果向下生成的图像应该能够表现为一个大概的人脸图像。Wake-Sleep算法分为醒(wake)和睡(sleep)两个部分。
1)wake阶段:认知过程,通过外界的特征和向上的权重(认知权重)产生每一层的抽象表示(结点状态),并且使用梯度下降修改层间的下行权重(生成权重)。也就是“如果现实跟我想象的不一样,改变我的权重使得我想象的东西就是这样的”。
2)sleep阶段:生成过程,通过顶层表示(醒时学得的概念)和向下权重,生成底层的状态,同时修改层间向上的权重。也就是“如果梦中的景象不是我脑中的相应概念,改变我的认知权重使得这种景象在我看来就是这个概念”。
deep learning训练过程具体如下:
1)使用自下上升非监督学习(就是从底层开始,一层一层的往顶层训练):
采用无标定数据(有标定数据也可)分层训练各层参数,这一步可以看作是一个无监督训练过程,是和传统神经网络区别最大的部分(这个过程可以看作是feature learning过程):
具体的,先用无标定数据训练第一层,训练时先学习第一层的参数(这一层可以看作是得到一个使得输出和输入差别最小的三层神经网络的隐层),由于模型capacity的限制以及稀疏性约束,使得得到的模型能够学习到数据本身的结构,从而得到比输入更具有表示能力的特征;在学习得到第n-1层后,将n-1层的输出作为第n层的输入,训练第n层,由此分别得到各层的参数;
2)自顶向下的监督学习(就是通过带标签的数据去训练,误差自顶向下传输,对网络进行微调):
基于第一步得到的各层参数进一步fine-tune整个多层模型的参数,这一步是一个有监督训练过程;第一步类似神经网络的随机初始化初值过程,由于DL的第一步不是随机初始化,而是通过学习输入数据的结构得到的,因而这个初值更接近全局最优,从而能够取得更好的效果;所以deep learning效果好很大程度上归功于第一步的feature learning过程。